Quadrotor Gripper Design
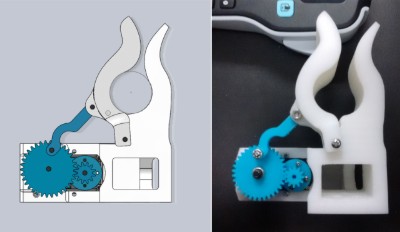
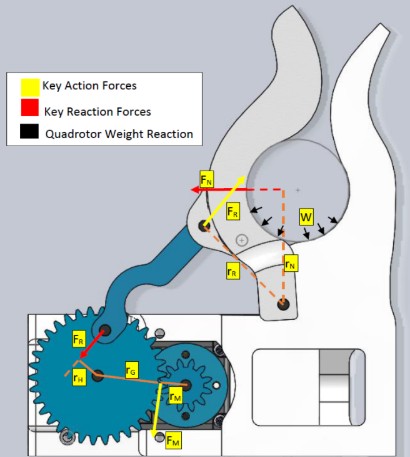
This project involved the design, fabrication, and testing of a motorized gripper for a quadrotor to perch on a rod. The gripper mechanism utilizes a four-bar linkage and a gear ratio to achieve a high mechanical advantage, maximizing gripping force. More details here
Key features include:
- Two design iterations to improve performance and durability.
- 3D-printed components using Zortrax printers.
- Ribbed rubber lining for enhanced friction.
- Bronze bushings to improve gear stability.
- Achieved a maximum gripping torque of 3.3 N·m.
Testing explored different capture configurations, and the results provided valuable insights for further design enhancements. The final gripper design successfully met the project requirements.
Technologies Used: 3D Printing, Solidworks, Kinematic Analysis
Course: University of Michigan
Back to Projects